Because apparently I hold the belief that one can’t own too many multicopters, I decided at one point to include a 3D Robotics Y6 in my menagerie. With 6 motors it would be something of a heavy lifter (what I was going to lift, I have no idea) and was something a bit different. I went so far as acquiring the frame kit, motors, props and electronic speed controllers (ESCs). It all tended to be a bit expensive as things get multiplied by six.
When it came time to start assembly I hit a psychological wall. While the basic design of the Y6 was very nice, the area provided for placement of the electronics, especially the ESCs, just plain sucked. It required a rat’s nest of wiring that was incongruous with the rest of the craft’s design. As a result, I just kept putting it aside hoping for an inspirational solution.
Around this time a friend of mine acquired a ready to fly QAV500 by Lumenier. Lumenier, owned by Tim Nilsen, had previously been known as GetFPV and had designed the original tricopter I built. I knew them to do very good stuff.
My friend’s QAV came with a DJI Naza flight controller. He specified this since he was primarily interested in something he could fly out of the box and not have to spend time tuning, like an APM flight controller. Unfortunately, he had a series of crashes with the QAV/Naza combo that damaged the Naza somewhat and it became less than reliable. So by the time I actually saw his QAV, it had already been through a number of crashes. And boy, was I impressed!
He had beaten the crap out of it yet the frame was holding up fine. He got the design with the aluminum arms and on one or two occasions when they got bent, he simply hammered them back into shape. In fact, when we were flying together his QAV decided to turn on its side and fell to the ground at low altitude. It was a fall that would have snapped arms on craft I designed but this just resulted in a broke prop or two for him. It occurred to me that this was the sort of frame that could withstand my destructive flying skills rather well.
After a bit of figuring, I found the Sunnysky 2216-12 800KV motors with APC 10×4.7 props were an excellent choice for a QAV. And I just happened to have 6 of them on hand from the Y6 project. So the Y6 frame went back into the box and ordered the QAV500 frame kit instead.
Having designed a few frames myself, I must say it’s a very impressive design. Easy to assemble and built like a tank. It includes silicone bobbins that isolate the motor part of the frame from the battery/flight controller/camera portion. And it’s very nice to have a built in power distribution board as part of the frame to cut down on power wiring.
Since I had a few extra APM flight controllers (who in their right mind has “extra” flight controllers???), that was my choice for the QAV. At one time I would have quickly chosen a Naza, but by now I had learned so much of how to program an APM, as well as understanding its logs for troubleshooting, Nazas held no interest. The reward for climbing the APM learning curve is immense. But still, almost all QAV500s I knew of were using Naza flight controllers not APMs, so this was poking a bit into unexplored territory.
I loaded the APM 3.01 firmware into the flight controller and just left it at the default quadcopter tuning parameters since I couldn’t find anything specific for QAV500s. I was nervous about the first flight, but I figured it should survive a crash or two without issue.
It turned out there was little need to worry. There were some small but rapid roll oscillations going on when it was just hovering. Sort of like a nervous Chihuahua. But other than that, it flew pretty damn well at less than 50% throttle. A little tweaking on the roll tuning eliminated the oscillations and it was all fine. Very stable in hover and the Return to Launch worked well. With FPV gear (and MinimOSD), an HD camera and a 3,300 mAh battery it weighed 1,609 grams, which struck me as surprisingly light. I can get flight times of up to 13 minutes with this setup.
Not long after this, firmware version 3.1 was released for the APM flight controller. This was a major release which included an “autotune” feature which can automatically tune a multicopter for you, while in the air. Considering how shit I am at tuning, I really wanted to try it, and selected the QAV to be the test victim.
After loading the 3.1 firmware I brought it up to a hover and turned on the Autotune. The QAV proceeded to spend the next several minutes having pitch seizures in the sky. This was very disconcerting to watch, but by rapidly varying the pitch and noting how the quad responded to it, the APM was deciding how to set the tuning parameters. Once done with the pitch, it started on the roll, again with the seizures. After a few minutes of that, it just stopped and hovered smoothly.
I took over control of the QAV to test out the new tuning. All I can say is “Wow!” I have never flown anything this nice. Solid control, very smooth and if desired, VERY fast. If there’s anything that might get me to stop designing my own frames, this is it. It’s now my go-to fun flying craft. No, it doesn’t fold down for transport into remote areas, but for FPV, video or mapping/imaging, it’s a dream.
The only thing I might change, in hindsight, would be to get the G-10 fiberglass arm option instead of the aluminum arms. I figured the aluminum arms would provide more strength in case of crashes and could be bent back into shape. But the thing is, since I got the QAV I haven’t crashed it (I realize by making that statement I’m now asking for it!). And what I’ve found is that much conductive material on the fame interferes somewhat with my RC receiver’s reception.
I discovered this while doing some distance testing. I got the QAV about 2,300′ out and it suddenly “failsafed”, turned around and started back to home (It’s programmed to do this if it loses the RC transmitter’s signal and will eventually return to its point of takeoff and land itself). Now granted I’m using 2.4 GHz for control (a Futaba receiver) but that struck me as rather short. I had been out to a full mile flying a fixed wing aircraft, but that was all foam. A more careful placement of the RC receiver’s antennas and changing the aluminum landing skids to Delrin plastic increased my distance to 4,500′ before failsafe so that helped a lot. But I think if I had fiberglass arms instead of aluminum I’d get even further.
All in all, a fantastic airframe, especially combined with an APM flight controller.
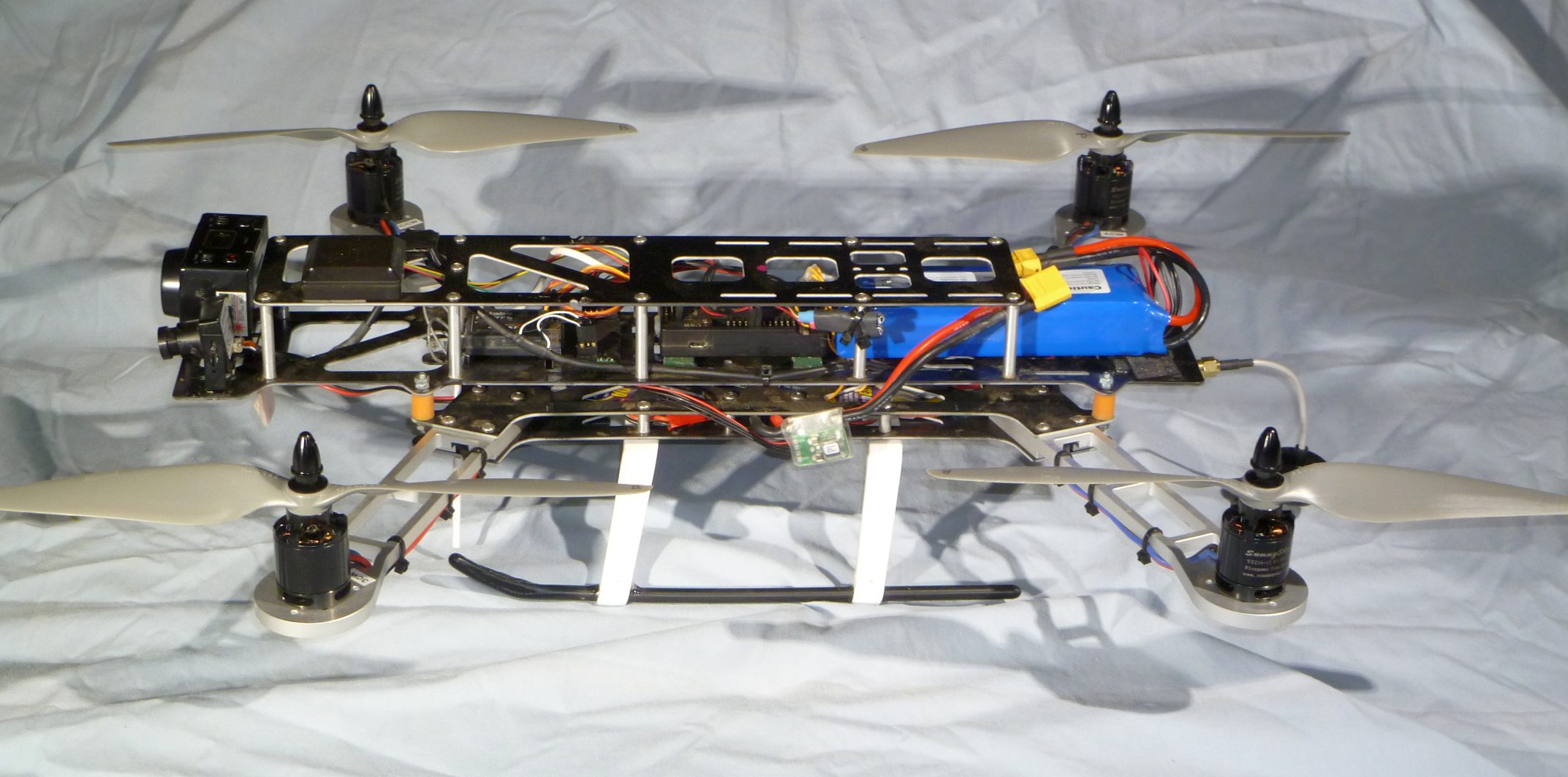
Side view of the QAV500. I found the model helicopter landing skids in my junk box and they happened to fit this frame quite well. The orange things are the silicone isolation bobbins that separates the upper part of the frame from the lower part of the frame with the motors. Neat design!

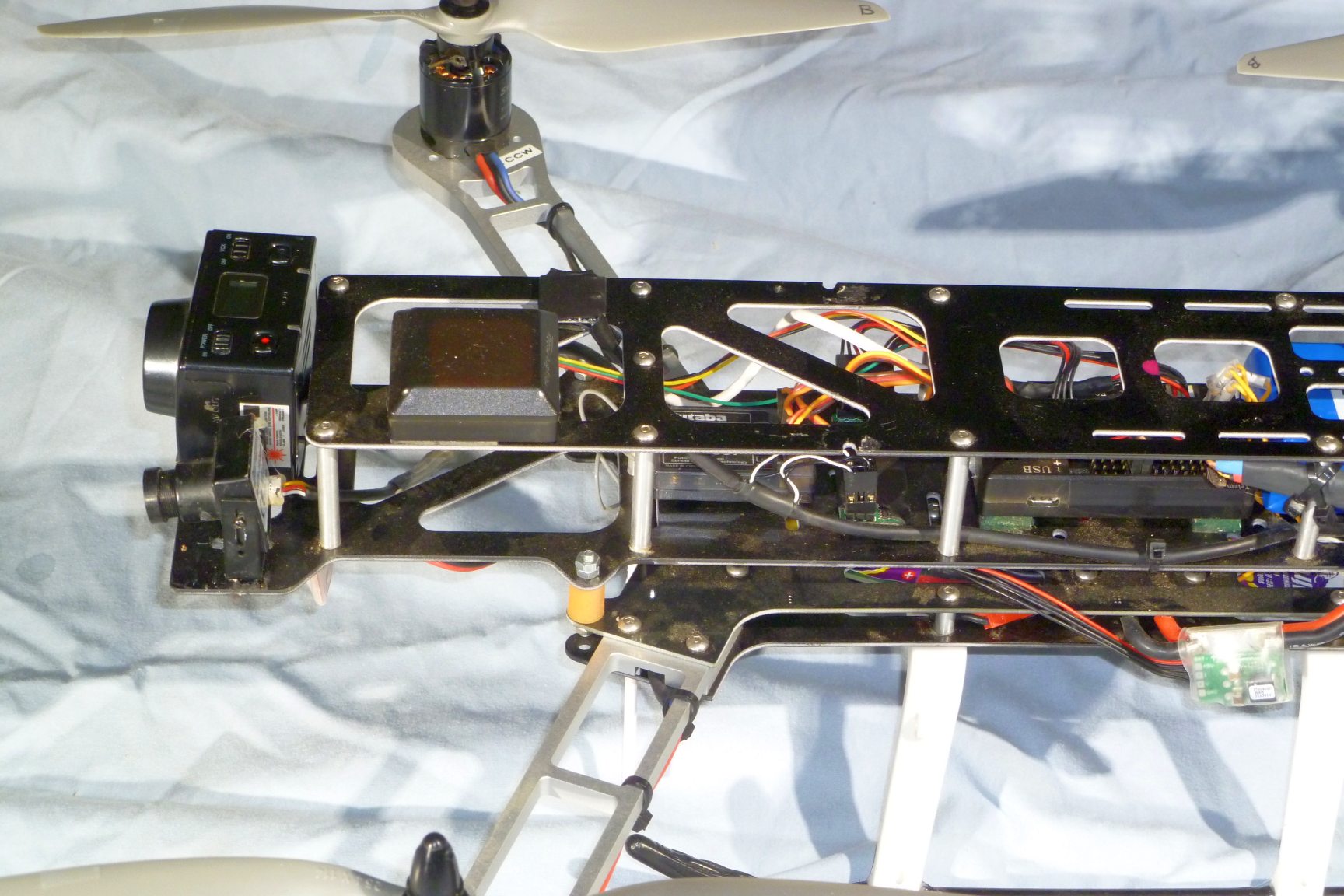
A quarter view of the QAV500. That little circuit board hanging off the side is the Power Module that provides clean power to the APM as well as voltage and current measurements. The circular video transmitter antenna is just visible at the far end.

Front view of the QAV500 showing the Swann HD video cam on the left and the FPV cam on the right. Just behind the cameras is the GPS. Note those nicely machined aluminum arms.
Front end of the QAV500 showing the cameras, GPS, RC receiver and APM flight controller. Still plenty of room to add more crap!