By this point I was seriously droned up. By this I mean I had developed a couple of new drones, a tricopter and quadcopter, that were fully up to the task of imaging Kutz Canyon without disaster. Indeed, the Kutz Canyon site provided the design requirements I used when designing these two copters. I learn from my past mistakes. Mostly.
I also had along a fixed wing drone, the StormChaser, for doing some real mapping. I built it to carry two Canon digital cameras, one in each wing, that could each take high resolution images every two seconds. I preprogrammed the plane to autonomously fly a grid pattern up and down the ridge spine when launched from the top of the overlook.
I arrived at Kutz just after a several day period of Summer thunderstorms. Looking down into the canyon I could see flowing water, not an encouraging sign. To get to the base of the spine a number of wash crossings are required, not something I was eager to try when wet even with a capable 4WD. So for my first effort I decided to just fly the StormChaser from the top. The next day, if things dried out, I’d attempt the drive to reach the bottom of the spine and fly my two copters up from there.
When doing planning for this mapping effort I sort of forgot the top of Kutz Canyon is around 6,500′ above sea level. This little tidbit was now starting to crawl back into my consciousness. In the thinner air at that altitude my plane was going to have to fly much faster to stay aloft, and faster means a harder, more sketchy launch. And I’m a bit crap at that to start with. Adding into the mix a typical brisk New Mexican wind suggested exciting times were ahead!
To compensate for the altitude I decided to lighten the plane as much as I could. This meant removing one of the two cameras and using a smaller, lighter set of flight batteries. I knew my flight time would be less, but I estimated (um….guessed) it would be enough.

The StormChaser and ground station prior to launch from the overlook.
I hand launched the StormChaser off the top and into the wind surprisingly without problem, if not without anxiety. I then circled it up to about 80′ above the overlook and threw the switch to send it on its autonomous mission. What should have happened was the plane would climb a bit, then head out over the canyon on its preprogrammed flight path. Instead, it started descending steeply towards the ground of the overlook. One of the very first things you learn in piloting is that no good will come of this.
I quickly took over manual control, put it back up into position and tried once more. Again, as soon as it went into autonomous mode it headed toward the ground. Well, crap. I assumed I had botched the altitude values when entering the waypoints it was programmed to use. And out in the field, with the plane already in the air, I wasn’t equipped to do much about it.
I decided to see if I could salvage the flight by just flying it manually. I knew from my mission planning I needed to go out from the overlook about 2,000′ north to fully cover the length of the spine. This distance data I could read off my ground station while the plane was in flight. The spine itself was fairly linear so using the FPV camera on the nose of the plane, I’d just fly a series of back and forth runs along the spine trying to offset each one as best I could. Since the software I’d be using to stitch the images together could just take all the images and figure them out pretty well on its own, spacing wasn’t too critical. So after about 25 minutes I had all the images I needed, landed without drama and headed for an overnight in Farmington.
The rest of that day was warm and dry and so was the next morning. The forecast was for increasing winds so I needed to get the copter stuff done early. They aren’t fond of winds, especially when flying over rough terrain. Heading out to the bottom reaches of Kutz, I found the route had just dried out. Attempting it the day before probably wouldn’t have ended well.
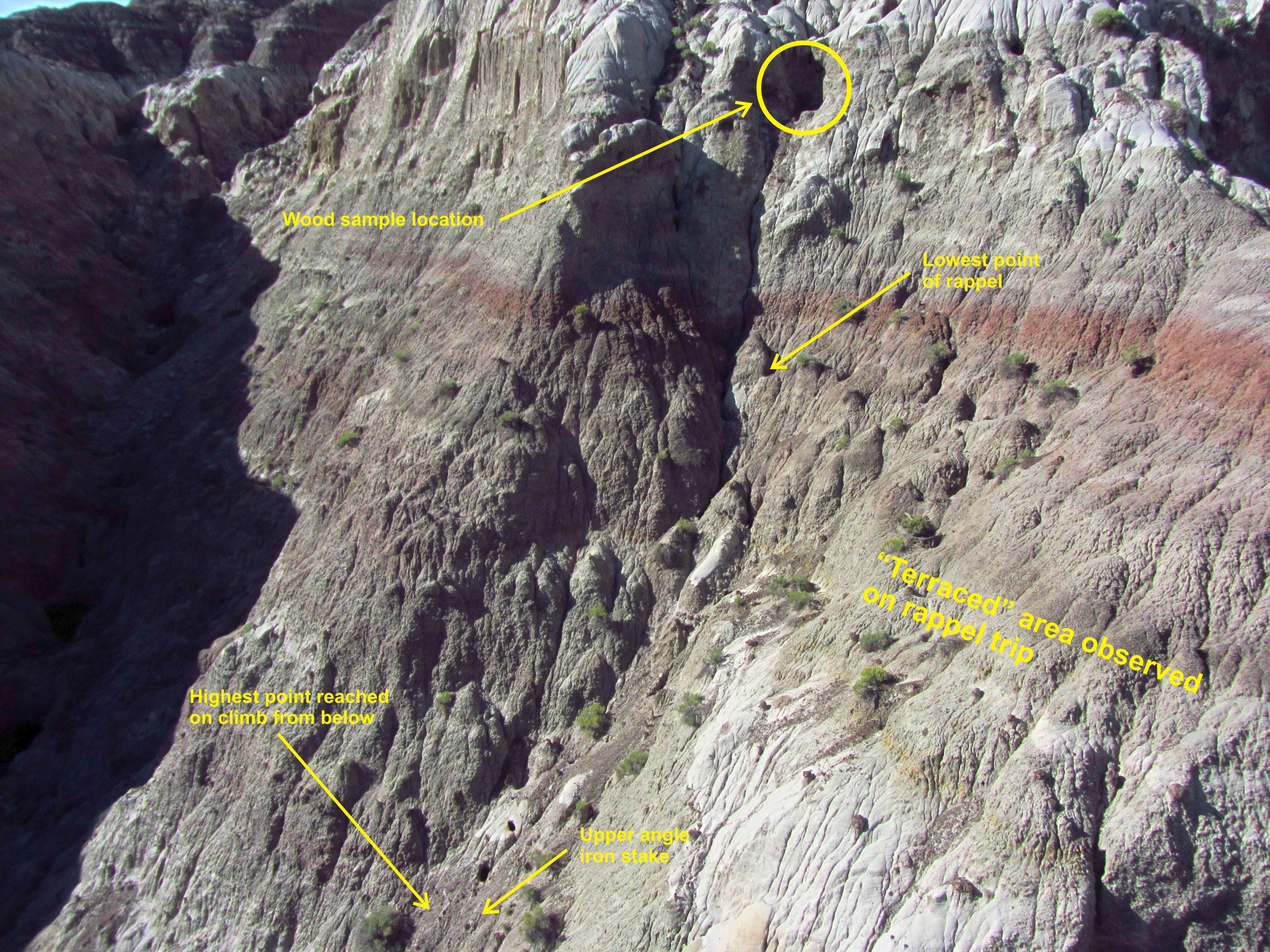
My highest priority was obtaining good oblique still images of the steep portions of the spine and that meant using my tricopter. I wanted images of my rappel route as well as the uncovered gap between the top of my early climb up from the canyon bottom and the lower end of my rappel. So while it was still calm I launched the tricopter and flew close to the spine. I also took aerial panorama shots of the entire site and closeups of the vertical mud face where I had recovered the wood samples on my rappel trip. A little to my amazement the tricopter flew brilliantly and I got all the stills I needed. Perhaps I’m actually getting decent at this stuff?

An overall image of the spine. The shrine is visible at the very top left and the gazebo of the overlook is at the top center.

Looking down Kutz Canyon Wash (due North) from above the spine.
A closeup image from the tricopter of the lower portion of the spine.

The upper portions of the spine.
Next up was my modified Tarot 650 quadcopter for a video flight. It was set up with a GoPro 3+ Black in a stabilized Tarot gimbal mount. This would hold the camera steady no matter how the quadcopter was tilting (well, up to a point, anyway). I wasn’t sure just what I’d use the video for, but it might provide a better, 3D feel for the terrain than the still images. Also the quadcopter was still new and I hadn’t yet completely finished its testing. I guessed this would be about as good as test as I could come up with.
To my delight the Tarot also flew fantastic. I really wasn’t used to my flying things all behaving themselves so well. In the past they often returned to ground at high speed. But this time I had some really great video.
Recovering the Tarot, that pretty much wrapped up everything I could possibly have wanted to do at Kutz. What remained was the crunching of the data.
I took the 630 images captured by the StormChaser and weeded them down to the best 290 images. These I fed into image processing software called PhotoScan by Agisoft. It can automatically take hundreds of images and create photo mosaics, with minimal user diddling. This type of software I love. Even cooler, PhotoScan can create 3D images and models from a still image collection, again, automatically. I have no idea how it does so but I suspect it’s either magic or recovered alien technology. Either way it works excellent.
Below is the Kutz Canyon spine mosaic, which I’ve resampled down to a reasonable file size of 3 megs (the original one has a monster file size!). So know that if you click on it. If you want a much larger file size, 16 stinkin’ megs but better resolution, you can grab it at this link instead.
{kind=link}
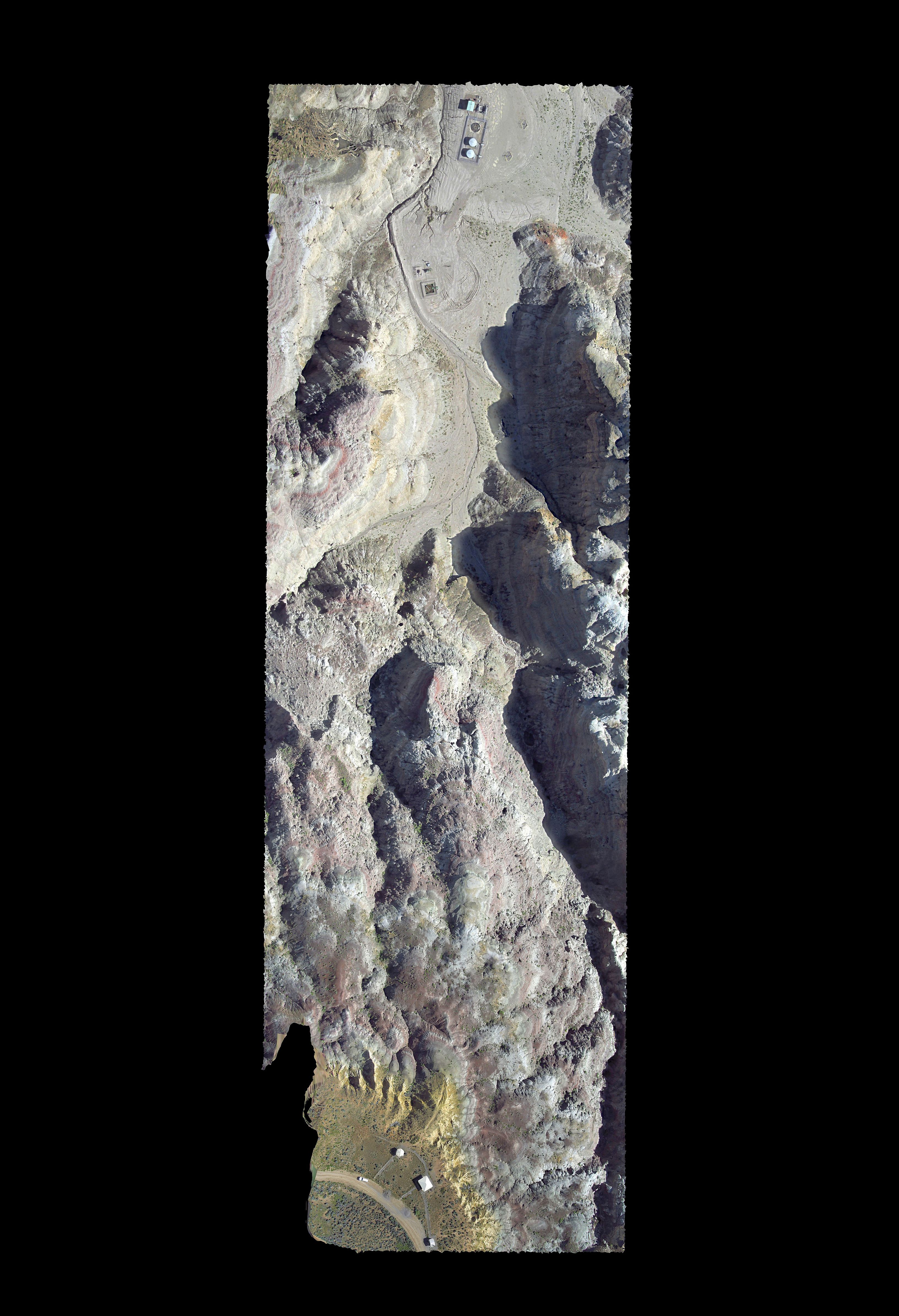
The Kutz Canyon Stairway area from the overlook to the canyon bottom. North is to the top.
The 3D model is a very interesting pdf. Now I’m not fully adept at these 3D pdfs, but if it’s opened in Adobe Acrobat it can be spun around and viewed from different angles. And of course zooming and the usual stuff. As far as I know you can’t just view these 3D pdfs in your browser (or at least it doesn’t work for me), but instead have to download the pdf file on to your PC and run it from there. Yeah, I know, it sounds like a hacker’s trick to get you to run a pdf, but you can probably trust me. Maybe.
Anyway, the 3D pdf model can be downloaded off this link. Be warned it’s a large file at 18 megs.
While I thought both these products were cool, it turned out I really liked the video most of all the products I generated. It turned out nice and smooth with no jello. Granted it lacks a soundtrack and is pretty boring unless you have interest in the Kutz Canyon spine (like maybe 5 people in the world??). But it gives an excellent sense of the topography of the spine. Most of the flight was focused on the area of the chute I had rappelled down on my earlier trip. Below is a slightly edited and annotated version of the video.
Next: My Conclusions (As in, did I learn anything at all?)
or, Back to the main Kutz Canyon Stairway page